揭陽正規晶圓運送機械吸臂維修
6)自適應控制。采用組合自適應控制將系統劃分成關節子系統和柔性子系統。利用參數線性化的方法設計自適應控制規則來辨識柔性機械臂的不確定性參數。對具有非線性和參數不確定性的柔性機械臂進行了**控制器的設計。控制器的設計是依據Lyapunov方法的魯棒和自適應控制設計。通過狀態轉換將系統分成兩個子系統。用自適應控制和魯棒控制分別對兩個子系統進行控制。7)PID控制。PID控制器作為很受歡迎和**廣泛應用的控制器,由于其簡單、有效、實用,被普遍地用于剛性機械臂控制,常通過調整控制器增益構成自校正PID控制器或與其它控制方法結合構成復合控制系統以改善PID控制器性能。8)變結構控制。變結構控制系統是一種不連續的反饋控制系統,其中滑模控制是**普遍的變結構控制。其特點;在切換面上,具有所謂的滑動方式,在滑動方式中系統對參數變化和擾動保持不敏感,同時,它的軌跡位于切換面上,滑動現象并不依賴于系統參數,具有穩定的性質。變結構控制器的設計,不需要機械臂精確的動態模型,模型參數的邊界就足以構造一個控制器。 工業機械臂的工作原理。揭陽正規晶圓運送機械吸臂維修
晶圓運送機械吸臂是半導體制造過程中不可或缺的重要設備之一。它主要用于將晶圓從一個工序轉移到另一個工序,確保晶圓在整個制造過程中的安全和穩定運輸。
晶圓運送機械吸臂具有高度的自動化和精確性。它采用先進的自動控制系統,能夠準確地定位和抓取晶圓,避免了人為操作的誤差和不穩定性。通過精確的控制,晶圓可以在不同工序之間快速而安全地轉移,提高了生產效率和產品質量。其次,晶圓運送機械吸臂具有高度的可靠性和穩定性。它采用了質量高的材料和先進的制造工藝,具有良好的耐磨性和抗腐蝕性。同時,晶圓運送機械吸臂經過嚴格的測試和檢驗,確保其在長時間運行中不會出現故障或損壞,保證了生產線的連續性和穩定性。 江蘇銷售晶圓運送機械吸臂企業隨著宇航業及機器人業的飛速發展,越來越多地采用由若干個柔性構件組成的多柔體系統。

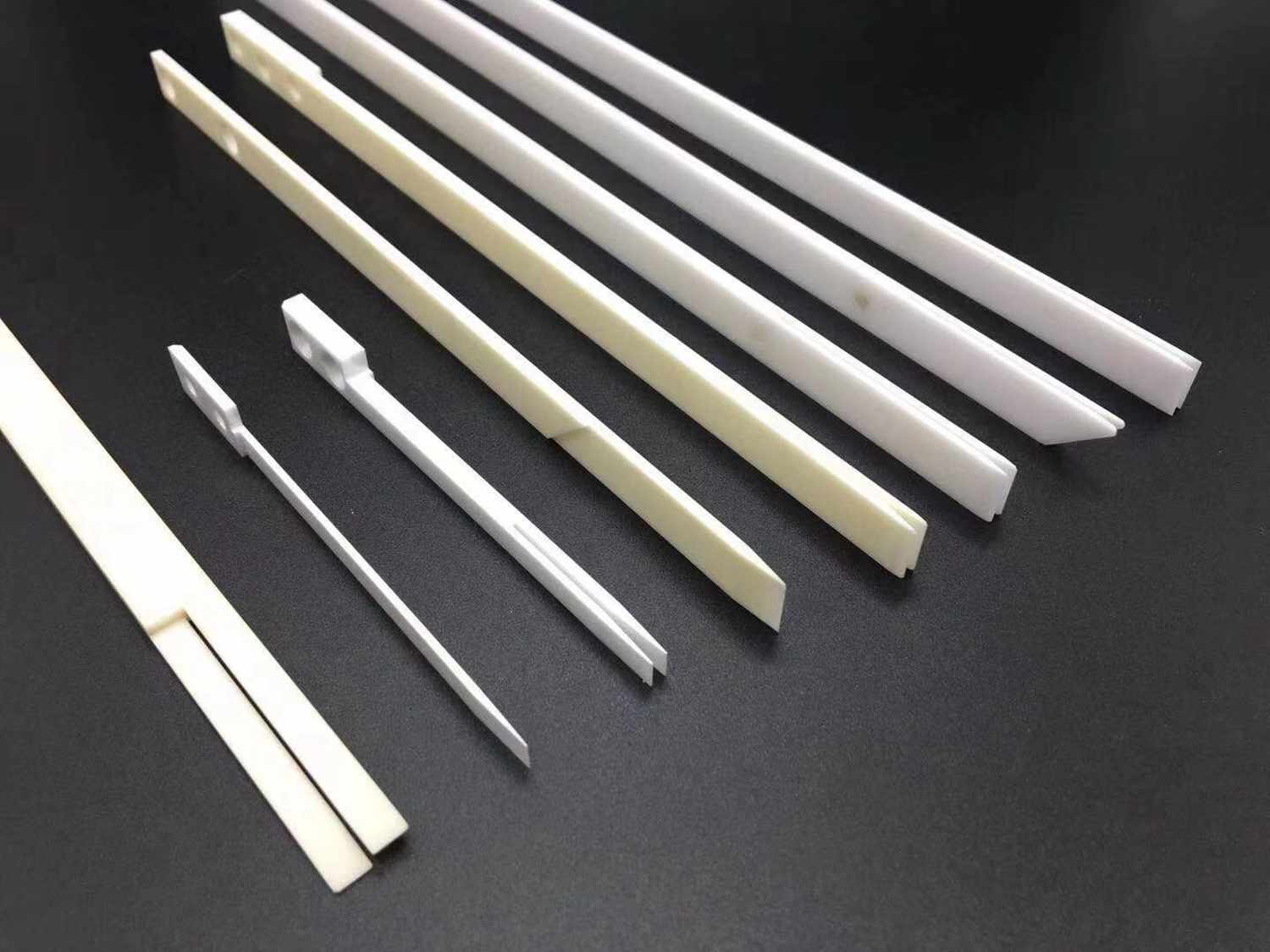
輸送半導體晶圓的機械手通常具有兩個以上的自由度。這種機械手典型地由兩個連桿和手部構成。在本說明書中,將兩個連桿稱作上臂連桿和前臂連桿。典型地,上臂連桿的一端連結于電機的輸出軸,上臂連桿的另一端連結于前臂連桿的一端。而且,前臂連桿的另一端連結于手部。上臂連桿和前臂連桿經由關節而連結。前臂連桿和手部也經由關節而連結。在各個關節處安裝有軸承,以便使連桿順暢地旋轉。在輸送半導體晶圓的機械手中,為了不污染傳送室內而屏蔽(shield)安裝于關節的軸承。
建模理論柔性機械臂動力學方程的建立主要是利用Lagrange方程和NeWton-Euler方程這兩個相當有代表性的方程。另外比較常用的還有變分原理,虛位移原理以及Kane方程的方法。而柔性體變形的描述是柔性機械臂系統建模與控制的基礎。因此因首先選擇一定的方式描述柔性體的變形,同時變形的描述與系統動力學方程的求解關系密切。[3]柔性體變形的描述主要有以下幾種:1)有限元法;2)有限段法;3)模態綜合法;4)集中質量法;動力學方程的建立無論是連續或離散的動力學模型,其建模方法主要基于兩類基本方法:矢量力學法和分析力學法。應用較***同時也是比較成熟的是Newton-Euler公式、Lagrange方程、變分原理、虛位移原理和Kane方程。 機械手的剛度、偏重力矩、慣性力及緩沖效果都直接影響手臂的位置精度。
半導體行業,尤其是集成電路領域,晶圓的身影隨處可見。
晶圓就是一塊薄薄的、圓形的高純硅晶片,而在這種高純硅晶片上可以加工制作出各種電路元件結構,使之成為有特定電性功能的集成電路產品。
眼前這密密麻麻的元器件,被整整齊齊的安放在一塊單晶硅材料之上,都是規規矩矩、方方正正的。可見,晶圓在實際應用之中還是要被切割成方形的。
所以疑問?來了——硅片為什么要做成圓的?為什么是“晶圓”,而不做成“晶方”?
要解釋這個問題,有兩方面的原因:一方面似乎是由“基因決定的”;另一方面是“環境造成的”。
本發明針對現有技術中的不足,提供了一種晶圓搬運機械手,本發明的機械手在傳送過程中晶片中心始終保證直線運動,且角度不會發生改變。從而提高機械手整體剛度和承重能力,同時提高了重復定位精度。本發明結構合理性能穩定,維護方便,多功能集一身,可滿足多種工藝設備要求,適用于各種半導體設備。
各支承、連接件的剛性也要有一定的要求,以保證能承受所需要的驅動力。江蘇銷售晶圓運送機械吸臂企業
設備配備智能控制系統,可實現自動化操作。揭陽正規晶圓運送機械吸臂維修
控制策略對柔性機械臂的控制一般有如下方式,1)剛性化處理。完全忽略結構的彈性變形對結構剛體運動的影響。例如為了避免過大的彈性變形破壞柔性機械臂的穩定性和末端定位精度NASA的遙控太空手運動的比較大角速度為。2)前饋補償法。將機械臂柔性變形形成的機械振動看成是對剛性運動的確定性干擾而采用前饋補償的辦法來抵消這種干擾。德國的BerndGebler研究了具有彈性桿和彈性關節的工業機器人的前饋控制。張鐵民研究了基于利用增加零點來消除系統的主導極點和系統不穩定的方法設計了具有時間延時的前饋控制器和PID控制器比較起來可以更加明顯的消除系統的殘余振動。SeeringWarrenP。等學者對前饋補償技術進行了深入的研究。 揭陽正規晶圓運送機械吸臂維修
行路致遠,砥礪前行。深圳市德澳美精密制造有限公司致力成為與您共贏、共生、共同前行的戰略伙伴,更矢志成為機械及行業設備富有影響力的企業,與您一起飛躍,共同成功!
- 揭陽直銷精密結構陶瓷設計 2025-02-15
- 江門晶圓運送機械吸臂推廣 2025-02-15
- 湛江新款精密結構陶瓷批發 2025-02-15
- 浙江原裝晶圓運送機械吸臂價格信息 2025-02-14
- 陽江銷售晶圓運送機械吸臂廠家報價 2025-02-14
- 陽江庫存微孔陶瓷真空吸盤價格 2025-02-14
- 河源新款精密結構陶瓷什么價格 2025-02-13
- 陽江進口精密結構陶瓷價格多少 2025-02-13
- 江蘇精密結構陶瓷價位 2025-02-13
- 汕頭新款精密結構陶瓷價位 2025-02-12
- 山東國內小型純電折彎機哪家好 2025-02-16
- 深圳珍珠棉沖壓機供貨價格 2025-02-16
- 意大利衛生級微射流均質機報價 2025-02-16
- 重慶襯套伺服壓裝機推薦廠家 2025-02-16
- 泉州購買力控打磨哪里買 2025-02-16
- 湖南超聲渦流一體機客戶至上 2025-02-16
- 松江區工業KK模組常見問題 2025-02-16
- 成都全自動超聲波塑焊機供應 2025-02-16
- 云南多功能傳感器價格便宜 2025-02-16
- 上海自動化工業冷凝器 2025-02-16